Online tool to make mixed mode (PI4 + CW + carrier) beacon assembler and hex files for John's, G8ACE, microwave Reverse DDS AD9851 based upon modifications of Andy's, G4JNT, original assempler file version Apr 2010. Modifications made by Steen, OZ2TG.
This webtool makes a .hex file and one single .asm file, that includes specific beacon hardware settings, the encoded PI4 message and the CW message. The .asm and .hex files are zipped for downloading. Then unzip and program the .hex file to the 16F628A in the RDDS unit. You can also use the files for a single frequency reference locked LO for a microwave transverter.
New features - version 2014-03-02
Accepts 9600 Baud NMEA
Compensation of delay between real time and GPS output data
Support for 11,2896 MHz and 12,288 MHz 16F628A crystals
Improved prescaler setting for better symbol accuracy
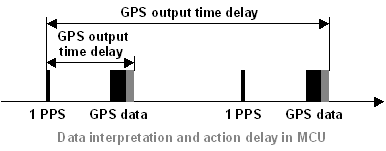
GPS data and output time delay
If the voltage level of the GPS data is above 5 V, e.g. RS-232 using +/- 12 V, then mount a 4,7 kΩ resistor in series with the data signal.
Most GPS receivers have less than 1 s delay. But many have more than 1 s delay and some even more than 2 s delay!
Please note that the polarity of the 1 PPS, if used, is designed to use a low-to-high transition/positive edge/active high.